Генерация аналоговых сигналов микроконтроллером. Ч1
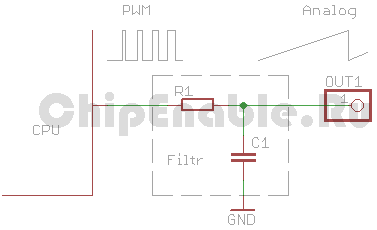
В устройствах на микроконтроллерах иногда требуется генерировать аналоговый сигнал. В зависимости от частоты аналогового сигнала, требуемого разрешения и типа используемого микроконтроллера, выполнить это можно несколькими способами. А именно: с помощью широтно-импульсной модуляции, используя функционал аппаратных таймеров или программную реализацию, с помощью встроенного цифроаналогового преобразователя (ЦАП`а), с помощью внешних схем цифроаналоговых преобразователей на дискретных элементах или с помощью внешних микросхем цифроаналоговых преобразователей.
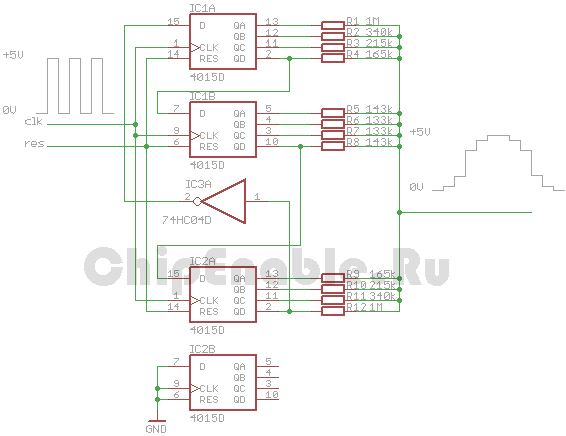
Генератор синусоидального сигнала на основе сдвигового регистра
Интересная схема генерации синусоидального сигнала предложена в одном из старых выпусков журнала EDN. Идея основана на использовании цифрового сдвигового регистра и нескольких резисторов с фиксированными номиналами. Схема показана на рисунке ниже.
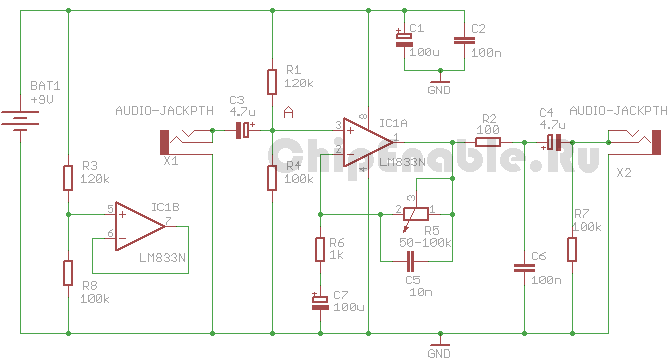
Простой аудио усилитель на операционном усилителе LM833
Это схема простого аудио усилителя на основе операционного усилителя LM833. Она относится к разряду тех схем, которые можно собрать за час "на коленке". Однако, несмотря на свою простоту, схема вполне работоспособна и при должном качестве сборки может найти применение в качестве усилителя для наушников и предусилителя электрогитары. Или, на худой конец, вашего первого собранного устройства.
Масштабирование сигнала с помощью операционного усилителя
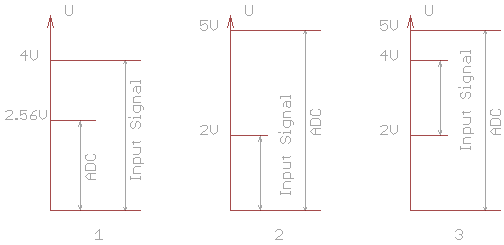
Для измерения аналоговых величин в цифровых системах используются аналогово-цифровые преобразователи (АЦП). АЦП характеризуются такими параметрами как диапазон входных напряжений и разрядность. Конечно, это не единственные его параметры, но сейчас нас интересуют именно они.
Диапазон входных напряжений зависит от опорного напряжения АЦП и определяет границы, в пределах которых аналоговый сигнал может быть оцифрован. Разрядность АЦП определяет шаг, с которым выполняется преобразование одной выборки аналогового сигнала.
Довольно часто возникает ситуация, когда диапазон входного измеряемого напряжения, не соответствует входному диапазону АЦП. Если он больше, АЦП не сможет измерить его значения за пределами своей шкалы, если меньше, то АЦП по сути будет работать в узком диапазоне и разрешение измеряемого напряжения будет низким.
Чтобы избежать этой ситуации применяются масштабирующие схемы, которые "подгоняют" интересующий нас диапазон входных напряжений под диапазон АЦП.
Регулятор скорости двигателя постоянного тока
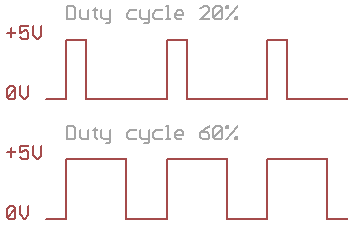
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.