Быстрое вычисление квадратного корня на Си
При программировании микроконтроллеров разработчики иногда сталкиваются с проблемой вычисления квадратного корня. Например, данная операция требуется при выполнении быстрого преобразования Фурье или вычислении среднеквадратического значения сигнала.
В стандартной библиотеке Си – math.h, есть функция для вычисления квадратного корня sqrt(), которой при желании можно воспользоваться. Она работает с числами типа float, обеспечивает высокую точность результата, но требует для своей работы длительного времени. Для микроконтроллера AVR это порядка 3000 циклов тактовой частоты (проверено в компиляторе IAR на разных уровнях оптимизации).
Если к точности вычисления корня не предъявляются высокие требования, можно воспользоваться упрощенным алгоритмом, занимающим меньше места в памяти и выполняющим вычисления в несколько раз быстрее.
AVR121: Повышение разрешения АЦП с помощью оверсемплинга ч2
Когда АЦП делает выборки сигнала, он кодирует его дискретными шагами. Это вносит некоторую ошибку, известную как ошибка квантования. Использование нормального усреднения будет только сглаживать флуктуации сигнала, тогда как метод оверсемплинга и децимации будет увеличивать разрешение. Суть метода заключается в дискретизации сигнала с более высокой частотой и вычислении новой выборки сигнала на основе полученных дополнительных выборок. Требуемая частота дискретизации может быть найдена по формуле 3-1. Сложение дополнительных выборок и сдвиг результата вправо на n, будет давать результат с разрешением, увеличенным на n разрядов.
AVR121: Повышение разрешения АЦП с помощью оверсемплинга ч1
Учебный курс AVR. Использование загрузчика (bootloader`a)
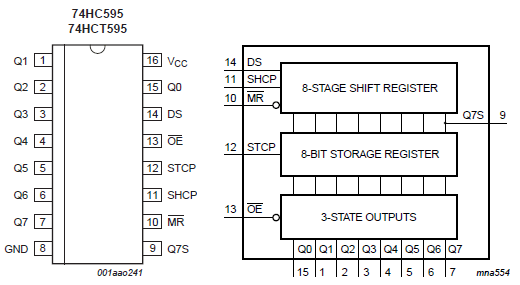
Учебный курс AVR. Работа с SPI модулем. Управление сдвиговыми регистрами. Ч3